Folgen Sie uns in den sozialen Medien, um keine Neuigkeiten zu verpassen.
Im Zeitalter bahnbrechender technologischer Fortschritte etablierten sich Navigationssysteme als grundlegende Säulen zahlreicher Entwicklungen, insbesondere in präzisionskritischen Bereichen. Der Weg von der rudimentären Himmelsnavigation zu hochentwickelten Trägheitsnavigationssystemen (INS) verdeutlicht das unermüdliche Streben der Menschheit nach Erforschung und höchster Genauigkeit. Diese Analyse untersucht eingehend die komplexe Funktionsweise von INS, beleuchtet die Spitzentechnologie der faseroptischen Gyroskope (FOGs) und die zentrale Rolle der Polarisation für die Aufrechterhaltung der Faserschleifen.
Teil 1: Entschlüsselung von Trägheitsnavigationssystemen (INS):
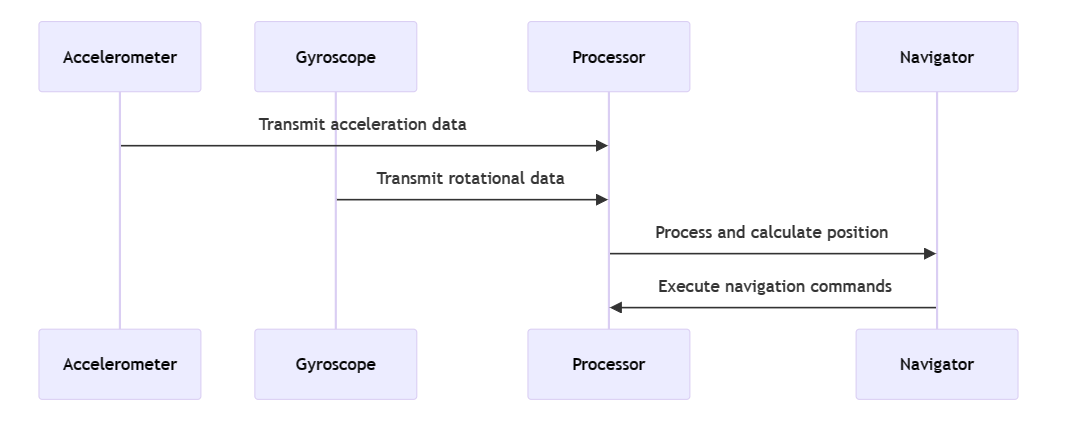
Inertialnavigationssysteme (INS) zeichnen sich als autonome Navigationshilfen aus, die Position, Orientierung und Geschwindigkeit eines Fahrzeugs präzise und unabhängig von externen Einflüssen berechnen. Diese Systeme harmonisieren Bewegungs- und Rotationssensoren und integrieren sich nahtlos in Rechenmodelle für Anfangsgeschwindigkeit, Position und Orientierung.
Ein archetypisches INS umfasst drei Kardinalkomponenten:
• Beschleunigungsmesser: Diese entscheidenden Elemente erfassen die lineare Beschleunigung des Fahrzeugs und wandeln die Bewegung in messbare Daten um.
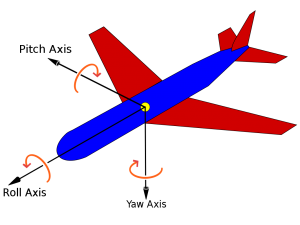
• Gyroskope: Unentbehrlich zur Bestimmung der Winkelgeschwindigkeit, sind diese Komponenten von entscheidender Bedeutung für die Systemausrichtung.
• Computermodul: Das Nervenzentrum des INS, das vielschichtige Daten verarbeitet, um Positionsanalysen in Echtzeit zu ermöglichen.
Die Unempfindlichkeit von INS gegenüber externen Störungen macht es im Verteidigungssektor unverzichtbar. Allerdings leidet es unter „Drift“ – einem allmählichen Genauigkeitsverlust –, der ausgefeilte Lösungen wie Sensorfusion zur Fehlerkorrektur erforderlich macht (Chatfield, 1997).
Teil 2. Betriebsdynamik des faseroptischen Gyroskops:
Faseroptische Gyroskope (FOGs) läuten eine neue Ära in der Rotationsmessung ein, indem sie die Interferenz von Licht nutzen. Dank ihrer hohen Präzision sind FOGs unverzichtbar für die Stabilisierung und Navigation von Luft- und Raumfahrzeugen.
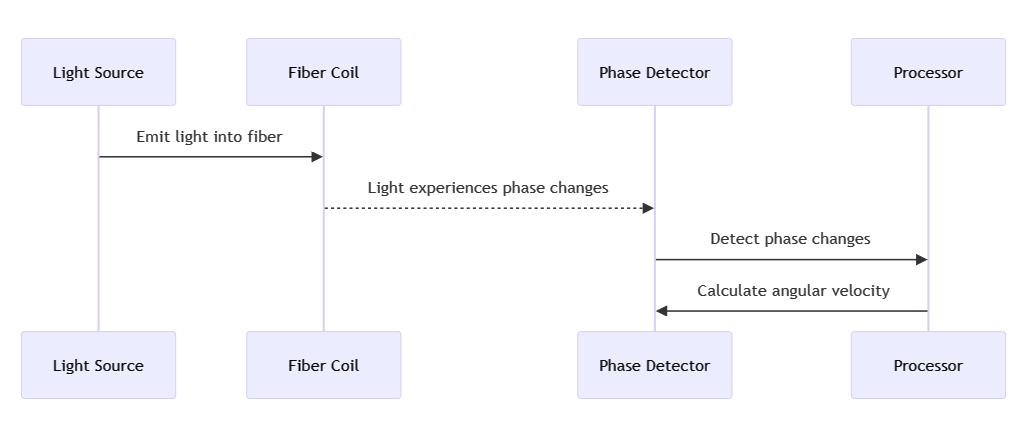
FOGs nutzen den Sagnac-Effekt, bei dem Licht, das sich in einer rotierenden Faserspule in entgegengesetzte Richtungen ausbreitet, eine Phasenverschiebung erfährt, die mit Änderungen der Rotationsgeschwindigkeit korreliert. Dieser differenzierte Mechanismus ermöglicht die präzise Messung der Winkelgeschwindigkeit.
Wesentliche Bestandteile sind:
• Lichtquelle: Der Ausgangspunkt, typischerweise ein Laser, der die kohärente Lichtbahn initiiert.
· FaserspuleEin spiralförmiger optischer Leiter verlängert die Lichtbahn und verstärkt dadurch den Sagnac-Effekt.
• Fotodetektor: Diese Komponente erkennt die komplexen Interferenzmuster des Lichts.
Teil 3: Bedeutung polarisationserhaltender Faserschleifen:
Polarisationserhaltende (PM) Faserringe, die für FOGs unerlässlich sind, gewährleisten einen einheitlichen Polarisationszustand des Lichts, was entscheidend für die Präzision des Interferenzmusters ist. Diese Spezialfasern, die der Polarisationsmodendispersion entgegenwirken, verbessern die Empfindlichkeit von FOGs und die Datenauthentizität (Kersey, 1996).
Die Auswahl der PM-Fasern, die durch betriebliche Erfordernisse, physikalische Eigenschaften und Systemharmonie bedingt ist, beeinflusst die übergeordneten Leistungskennzahlen.
Teil 4: Anwendungen und empirische Belege:
FOGs und INS finden in verschiedensten Anwendungsbereichen Verwendung, von der Steuerung unbemannter Flugmissionen bis hin zur Gewährleistung filmischer Stabilität unter unvorhersehbaren Umweltbedingungen. Ein Beweis für ihre Zuverlässigkeit ist ihr Einsatz in den Mars-Rovern der NASA, wo sie eine ausfallsichere Navigation im Weltraum ermöglichen (Maimone, Cheng und Matthies, 2007).
Die Marktentwicklungen lassen auf eine wachsende Nische für diese Technologien schließen, wobei die Forschungsrichtungen darauf abzielen, die Systemresilienz, Präzisionsmatrizen und Anpassungsfähigkeitsspektren zu stärken (MarketsandMarkets, 2020).

Ringlasergyroskop
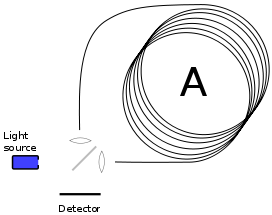
Schematische Darstellung eines faseroptischen Gyroskops basierend auf dem Sagnac-Effekt
Referenzen:
- Chatfield, AB, 1997.Grundlagen der hochpräzisen Trägheitsnavigation.Fortschritte in der Raumfahrt und Luftfahrt, Band 174. Reston, VA: Amerikanisches Institut für Luft- und Raumfahrt.
- Kersey, AD, et al., 1996. „Faseroptische Gyroskope: 20 Jahre technologischer Fortschritt“, inProceedings of the IEEE,84(12), S. 1830-1834.
- Maimone, MW, Cheng, Y. und Matthies, L., 2007. „Visuelle Odometrie auf den Mars-Explorationsrovern – Ein Werkzeug zur Gewährleistung präziser Fahr- und Wissenschaftsbildgebung“,IEEE Robotics & Automation Magazine14(2), S. 54-62.
- MarketsandMarkets, 2020. „Markt für Trägheitsnavigationssysteme nach Qualitätsstufe, Technologie, Anwendung, Komponente und Region – Globale Prognose bis 2025.“
Haftungsausschluss:
- Wir erklären hiermit, dass bestimmte Bilder auf unserer Website aus dem Internet und von Wikipedia stammen und ausschließlich zu Bildungs- und Informationszwecken verwendet werden. Wir respektieren die Urheberrechte aller Urheber. Die Bilder werden ohne kommerzielle Absicht verwendet.
- Wenn Sie der Ansicht sind, dass Inhalte, die wir verwenden, Ihre Urheberrechte verletzen, kontaktieren Sie uns bitte. Wir ergreifen selbstverständlich alle notwendigen Maßnahmen, wie beispielsweise die Entfernung der Bilder oder die korrekte Quellenangabe, um die Einhaltung der Gesetze und Bestimmungen zum Schutz geistigen Eigentums zu gewährleisten. Unser Ziel ist es, eine Plattform zu betreiben, die reich an Inhalten ist, fair ist und die Rechte am geistigen Eigentum anderer respektiert.
- Bitte kontaktieren Sie uns über die folgende Kontaktmethode:email: sales@lumispot.cnWir verpflichten uns, nach Erhalt einer Benachrichtigung unverzüglich Maßnahmen zu ergreifen und eine hundertprozentige Zusammenarbeit bei der Lösung solcher Probleme zu gewährleisten.
Veröffentlichungsdatum: 18. Oktober 2023